CASE STUDY: AUTOMATED DNA SAMPLE EXTRACTION ROBOT
![]()
THE PRODUCT
Genetic testing has gained popularity in recent years. There are multiple companies offering to decode your heritage, your genetic disposition for certain diseases, and even your dog’s DNA. All it takes is swabbing your mouth and sending the sample back for analysis. But what happens with the millions of vials of samples that are generated? Our client came to us with the problem of needing to automate the unscrewing of the vials and extracting the DNA from the sample as the current process was overloading people doing it manually, trying to keep up with the demand.
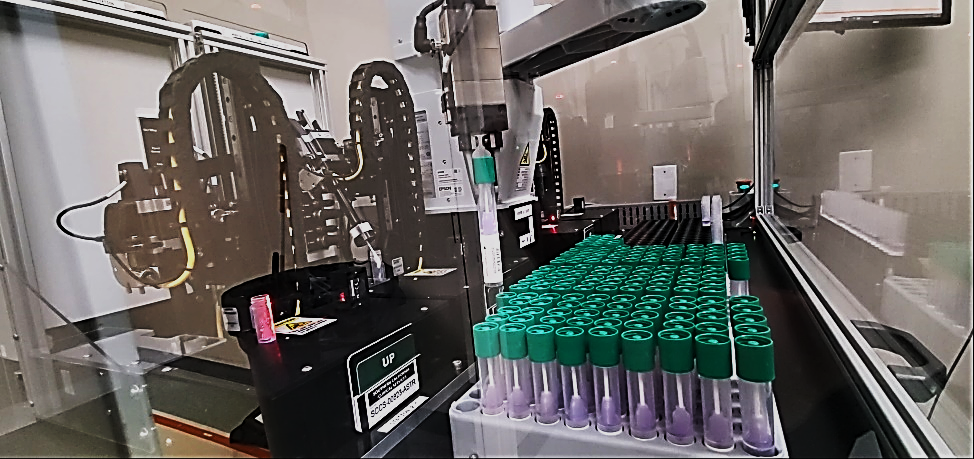
Simplexity was selected to design a fully automated lab station used to extract DNA from sample swabs, and decided to use a SCARA robot to do so. The robot uncaps the vials, extracts DNA, discards the processed swab, and delivers the opened vials to an output tray with their barcodes aligned towards the user for easy user identification.
OUR ROLE
Simplexity provided full product development from preliminary design evaluation to delivery and support of two production tools through three distinct phases of development. Our solution replaced a team of skilled operators with sore wrists offering a “set and forget” automated platform.
MECHANISM DESIGN:
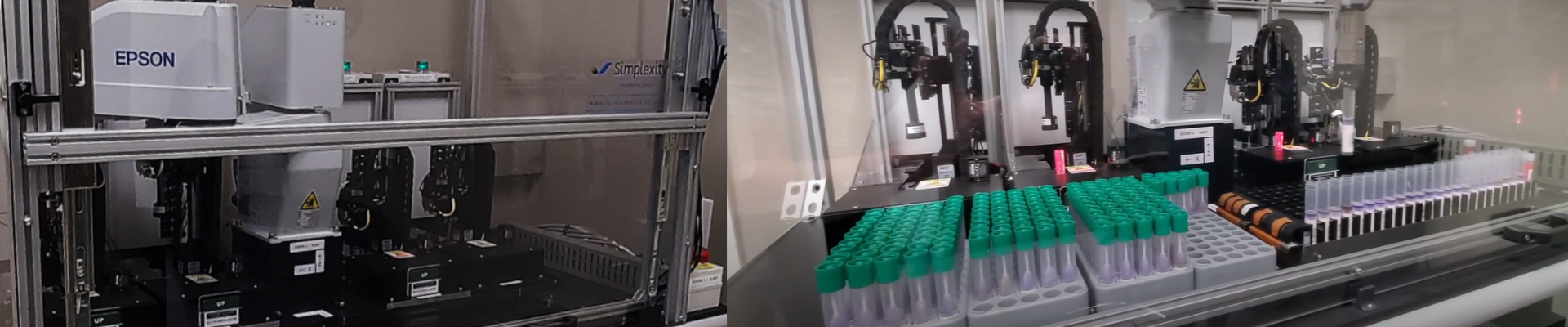
Utilizing a modular design, we incorporated four custom-designed sample extraction stations. Each station is serviced by a pick and place robot within a self-contained safety enclosure mounted on a modified rolling lab bench.
SYSTEMS DESIGN:
Our team implemented motion planning for the pick and place robot within the safety enclosure, enabling seamless movement between two input trays, four processing stations, and two output trays in arbitrary order for minimal cycle time.
SOFTWARE:
We developed custom software featuring a modular framework and advanced error handling to keep the system running, setting aside impossible-to-process samples and continuing with any of the four processing stations that remain available without user intervention.
Dual access level:
- Admin access with highly customizable “recipes” for tuning performance and manual motion controls to directly control every axis of motion.
- Operator access with simplified “set and forget” operation, status light and audible feedback along with scrolling log file window to give up to date tool condition feedback.
TESTING THE AUTOMATED DNA SAMPLE EXTRACTION ROBOT:
Our robust test plan, derived from device requirements and DFMEA, ensured product reliability.
Automated testing recorded with dedicated camera system to “play back” any issues for enhanced troubleshooting capability with lowered labor cost.
The Problem to be Solved: Large number of operators working in shifts to limit repetitive motion injury uncap and extract DNA samples by hand.

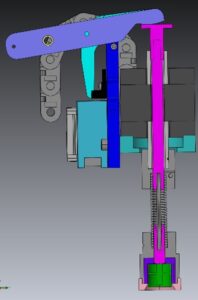
Phase 0, Early Proof of Concept: Using an in-house mill, laser cut and 3D printed assembly to test automated theory of operation quickly.

Phase 0, Updated Proof of Concept: Replacing an angled sample tube with a flexible shaft to improve extraction
Phase 1, First Breadboard Design: Transferring the proven theory of operation to durable machined components.

Phase 1, First Breadboard Tool: The first finished breadboard used to verify the workflow with controlled batches

Phase 2, Prototype multi-station tool with one user loading/unloading of samples added to client production workflow
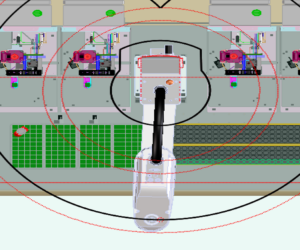
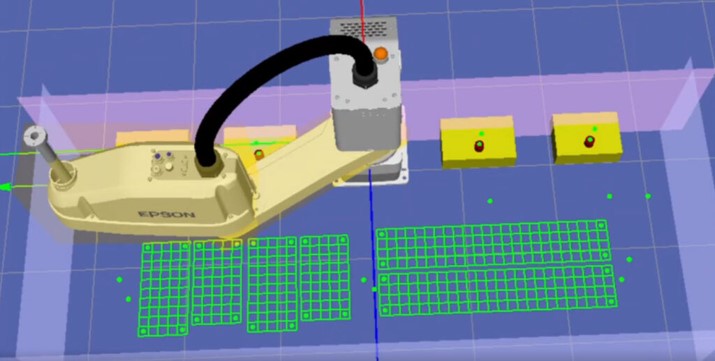
Phase 3, Production Design: Simulating full pick and place system and definition motion envelope
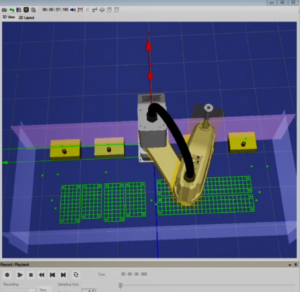
Phase 3, Product Design: Full workflow simulation of automated pick and place system.

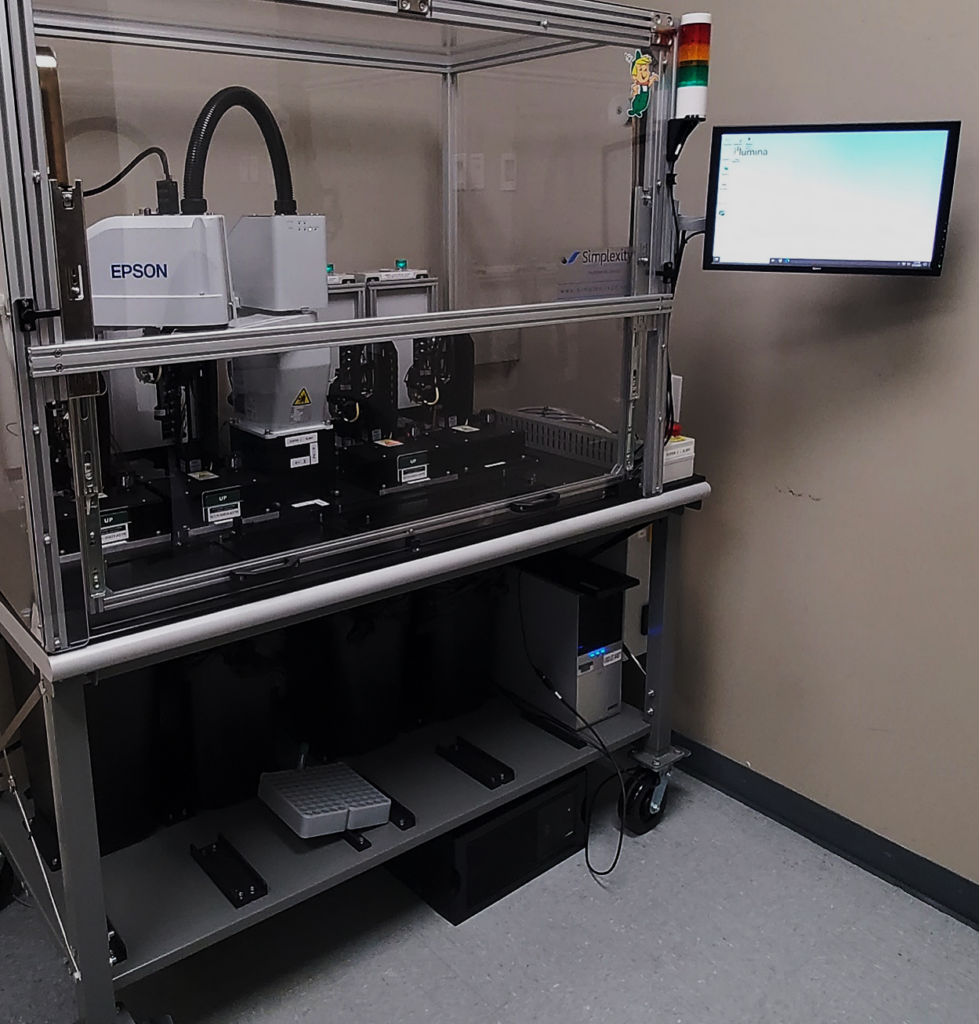
Phase 3 Production Tool: A fully automated system able to process 2 full input trays and transfer them to output trays with no user intervention
Phase 3 Production Tool: Full system on integrated table with locking industrial casters for easy reconfiguration of the production space.
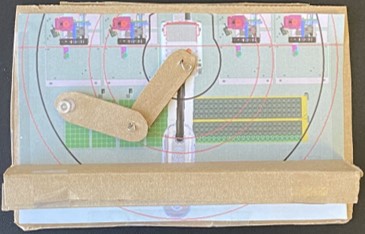
Prototyping & Simulation for SCARA Robot implementation
- We used simple carboard mockups and simulation software to determine the optimal move pattern prior to full design.
AUTOMATED DNA SAMPLE EXTRACTION VIDEO
Watch the robot in action as it offers an automated solution helping technicians by replacing manual labor to prevent repetitive motion injuries.